Driving Forward: Semantic Segmentation in Autonomous Vehicles
Semantic segmentation plays a crucial role in the advancement of autonomous vehicles. This technique involves accurately assigning each pixel in an image to a specific class, allowing the vehicle's perception system to understand and interpret its surroundings. Deep learning algorithms, such as convolutional neural networks (CNNs) and autoencoders, have significantly improved the efficiency and accuracy of semantic segmentation in autonomous vehicles. By combining these architectures with cutting-edge approaches like feature pyramid networks and bottleneck residual blocks, researchers have developed powerful models capable of performing semantic segmentation in real-time. The use of semantic segmentation enables autonomous vehicles to accurately detect and track objects, analyze real-time data, and make informed decisions, ultimately improving the safety and efficiency of autonomous driving systems.

Key Takeaways:
- Semantic segmentation assigns each pixel in an image to a specific class in autonomous vehicles.
- Deep learning algorithms like CNNs and autoencoders have enhanced the efficiency and accuracy of semantic segmentation.
- Feature pyramid networks and bottleneck residual blocks have further improved real-time semantic segmentation.
- Semantic segmentation enables accurate object detection and tracking in autonomous vehicles.
- Real-time data analysis with semantic segmentation enhances the safety and efficiency of autonomous driving systems.
The Importance of Semantic Segmentation in Autonomous Vehicles
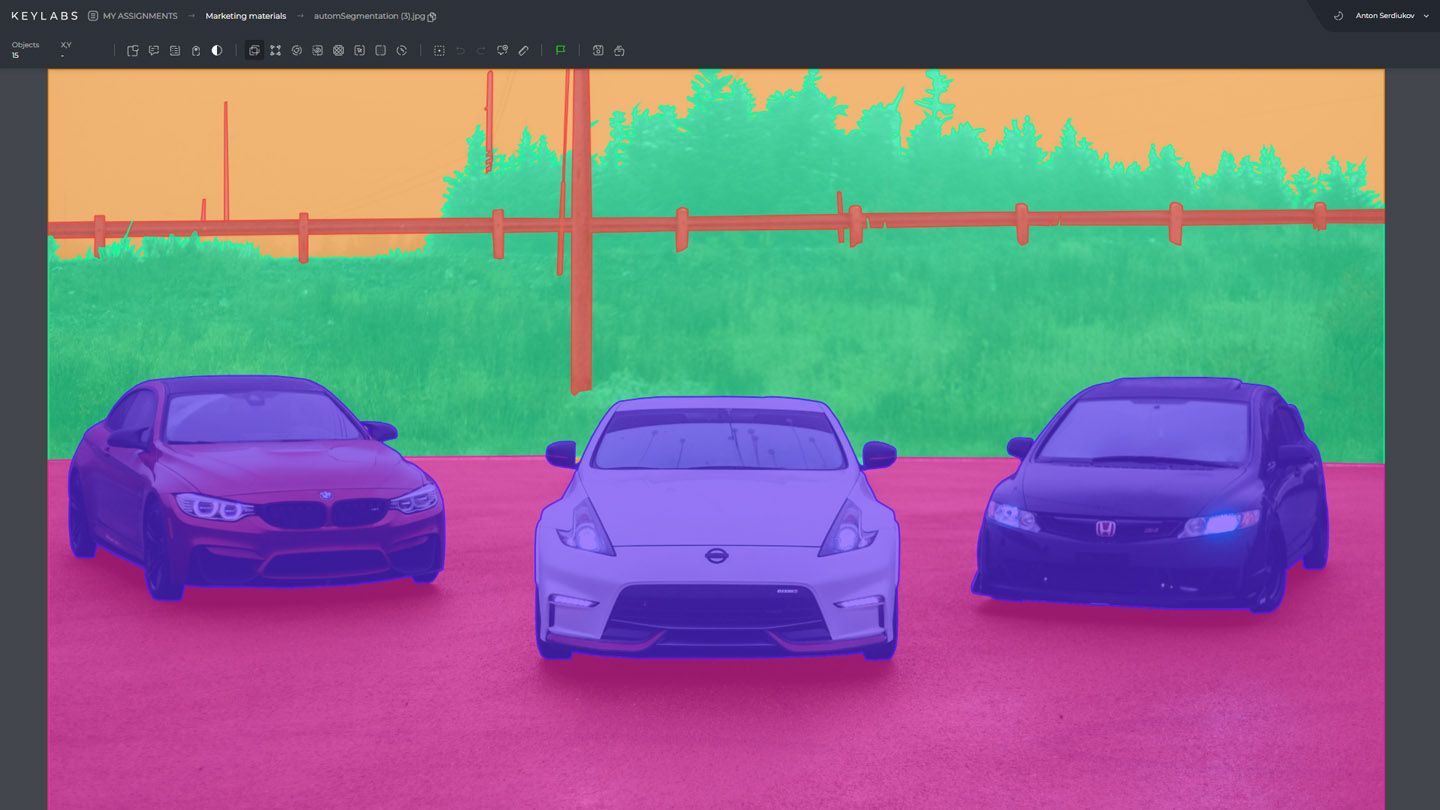
Semantic segmentation plays a crucial role in enabling autonomous vehicles to understand and interpret their environment. By assigning each pixel in an image to a specific class, semantic segmentation provides a detailed understanding of the objects present, including roads, cars, signs, traffic lights, and pedestrians. This information is essential for autonomous driving systems to make informed decisions about their movements and interactions with the surroundings.
Prior to recent advances in deep learning algorithms, traditional methods of semantic segmentation lacked efficiency and accuracy. However, with the advent of new technology and the application of deep learning algorithms such as convolutional neural networks (CNNs) and autoencoders, the process has significantly improved.
Deep learning algorithms, powered by the capabilities of neural network models, have enhanced the efficiency and accuracy of semantic segmentation. These algorithms employ real-time visual signal processing techniques, allowing autonomous vehicles to comprehend complex scenarios in a dynamic environment. By leveraging deep learning algorithms, autonomous vehicles can efficiently process the vast amount of visual data from their sensors, enabling real-time semantic segmentation with unparalleled precision.
Scenario Comprehension and Situation Understanding
The ability to perform semantic segmentation in real-time provides autonomous vehicles with a comprehensive understanding of various driving scenarios. This understanding extends beyond merely detecting objects—semantic segmentation enables the vehicle's perception system to comprehend the relationships and interactions between different objects, ultimately enhancing the vehicle's decision-making capabilities.
For example, semantic segmentation allows autonomous vehicles to differentiate between various lane markings, understand road geometries, and identify potential obstacles or hazards. By perceiving the driving scene at a pixel-level granularity, autonomous vehicles can effectively assess the surrounding environment, optimizing driving strategies for improved safety and efficiency.
"Semantic segmentation provides autonomous vehicles with a detailed understanding of their environment, enabling them to make informed decisions and navigate their surroundings safely and efficiently."
Real-Time Visual Signal Processing
The incorporation of semantic segmentation in real-time visual signal processing facilitates dynamic decision-making in autonomous vehicles. By continuously analyzing and interpreting the environment, autonomous vehicles can adapt their behavior instantaneously to changing circumstances.
Real-time semantic segmentation also enables autonomous vehicles to accurately detect and classify dynamic objects, such as pedestrians and cyclists, ensuring proactive and safe interactions. Moreover, it empowers the vehicle to respond rapidly to traffic signs and signals, optimizing the flow of traffic and reducing congestion.
Deep learning algorithms, combined with real-time visual signal processing, provide an unparalleled level of situational awareness for autonomous vehicles, paving the way for safer, more efficient transportation systems.
New Technology and Deep Learning Algorithms
The emergence of new technologies, alongside the extraordinary capabilities of deep learning algorithms, has revolutionized the field of semantic segmentation in autonomous vehicles. Convolutional neural networks (CNNs) and autoencoders have enabled more accurate and efficient pixel-level classification, leading to improved semantic segmentation performance.
CNNs excel at extracting relevant features from images, allowing for precise pixel classification. Autoencoders, on the other hand, learn to reconstruct input images, capturing crucial information for semantic segmentation. By leveraging these deep learning algorithms, autonomous vehicles can perform semantic segmentation at exceptional speeds without compromising accuracy.
Visualizing the Importance of Semantic Segmentation
To illustrate the importance of semantic segmentation, consider the following table:
| Object | Description | Importance |
|---|---|---|
| Road | A clear path for driving | Essential for navigation |
| Cars | Other vehicles on the road | Collision avoidance |
| Signs | Traffic regulations and information | Safe driving and adherence to laws |
| Traffic Lights | Controlled intersections | Safe and efficient traffic flow |
| Pedestrians | People crossing the road | Pedestrian safety |
Deep Learning Techniques for Semantic Segmentation
Deep learning techniques have brought significant advancements to the field of semantic segmentation in autonomous vehicles. Convolutional neural networks (CNNs) and autoencoders, in particular, have revolutionized the accuracy and efficiency of semantic segmentation models.
CNNs, as powerful neural network models, excel at learning and extracting features from images, making them ideally suited for pixel-level classification tasks like semantic segmentation. By leveraging the hierarchical structure of CNNs, these models effectively capture both low-level and high-level image features, enabling precise segmentation of objects in complex scenes.
On the other hand, autoencoders provide valuable insights into semantic segmentation by learning to reconstruct input images. By training on a reconstruction objective, autoencoders can capture and represent essential features necessary for the segmentation process. This unsupervised learning approach enhances the performance and robustness of semantic segmentation models.
To further enhance the capabilities of semantic segmentation models, researchers have introduced cutting-edge techniques such as feature pyramid networks (FPNs) and bottleneck residual blocks. FPNs enable efficient multi-scale feature extraction, allowing the model to capture both global and local contextual information. Bottleneck residual blocks optimize the information flow across deep networks, enabling seamless integration of high-level and low-level features, thus improving segmentation accuracy.
An essential resource for training and evaluating deep learning models for semantic segmentation is the CamVid dataset. This dataset, which has been augmented to provide a larger and more diverse training set, consists of video sequences captured by a vehicle-mounted camera. It includes various urban driving scenes with pixel-level annotations, making it an ideal benchmark for evaluating the performance of semantic segmentation models in autonomous vehicles.
By leveraging deep learning techniques, such as CNNs and autoencoders, and incorporating advanced approaches like FPNs and bottleneck residual blocks, researchers continue to push the boundaries of semantic segmentation in the context of autonomous vehicles. These techniques not only improve the accuracy and speed of segmentation but also contribute to the development of safer and more efficient autonomous driving systems.
Key Advances in Deep Learning Techniques for Semantic Segmentation:
- Convolutional neural networks (CNNs) for accurate feature extraction
- Autoencoders for capturing important features in the reconstruction
- Feature pyramid networks (FPNs) for multi-scale feature extraction
- Bottleneck residual blocks for optimized information flow
Real-Time Data Analysis in Semantic Segmentation
Real-time data analysis is a critical aspect of semantic segmentation in autonomous vehicles. As the vehicle's perception system continuously receives input from its sensors, such as cameras and LiDAR, it needs to analyze this data quickly and accurately to understand the driving scene in real-time.
Semantic segmentation algorithms enable the vehicle to classify each pixel in the input images, providing valuable information about the objects present in the scene. This real-time analysis allows the autonomous driving system to make immediate decisions based on the current driving situation, improving the vehicle's ability to navigate its surroundings safely and efficiently.
Visual Signal Processing and Scene Understanding
Real-time data analysis in semantic segmentation involves visual signal processing and scene understanding. Visual signal processing techniques extract useful information from the input data, such as image features and characteristics, which are then used to classify pixels into specific classes. Scene understanding refers to the vehicle's ability to interpret and comprehend its environment based on the segmented image.
By continuously analyzing the real-time data, the vehicle can identify and interpret various objects present in the scene, including roads, lane markings, vehicles, pedestrians, and traffic signs. This comprehensive scene understanding enables the autonomous driving system to make informed decisions, such as determining lane positions, detecting obstacles, and anticipating potential hazards.
Benefits of Real-Time Data Analysis
The use of real-time data analysis in semantic segmentation offers several benefits for autonomous driving systems:
- Enhanced Safety: Real-time analysis allows the vehicle to detect and respond to dynamic changes in the driving environment promptly, reducing the risk of accidents.
- Efficient Navigation: By continuously analyzing the data in real-time, autonomous vehicles can adapt their movements and trajectories to optimize navigation and route planning.
- Reliable Object Detection: Real-time data analysis enables accurate and robust object detection and tracking, improving the vehicle's ability to identify and interact with other objects on the road.
- Improved Decision-Making: The immediate analysis of real-time data enhances the vehicle's decision-making capabilities, enabling it to react to complex driving scenarios and make timely choices.
Real-Time Data Analysis Challenges
Despite its benefits, real-time data analysis in semantic segmentation poses specific challenges:
- Processing Power: Real-time analysis requires significant computational power to perform pixel-level classification quickly, necessitating efficient hardware and optimized algorithms.
- Data Complexity: The high volume and complexity of input data from various sensors, such as cameras and LiDAR, present challenges in processing and analyzing the data in real-time.
- Time Constraints: Real-time analysis requires timely and efficient processing to ensure immediate responses and decision-making, leaving minimal room for processing delays.
To address these challenges, researchers continuously explore new algorithms, hardware advancements, and optimization techniques to achieve faster and more accurate real-time data analysis in semantic segmentation.
| Challenges | Solutions |
|---|---|
| Processing Power | Advanced hardware accelerators, optimized algorithms, and parallel processing techniques |
| Data Complexity | Data fusion techniques, advanced sensor technologies, and efficient data preprocessing methods |
| Time Constraints | Real-time task scheduling and system optimization to reduce processing delays |
Applications of Semantic Segmentation in Autonomous Vehicles
Semantic segmentation plays a vital role in the field of autonomous vehicles, empowering them with the ability to understand and interpret their environment. It finds a wide range of applications, contributing to the safe and efficient operation of these vehicles.
Object Detection and Tracking
One of the primary applications of semantic segmentation in autonomous vehicles is object detection and tracking. By accurately assigning each pixel to a specific class, semantic segmentation allows the vehicle's perception system to identify and track objects such as cars, pedestrians, and traffic signs. This capability is crucial for ensuring the safety of the vehicle and its passengers, as well as for enabling smooth interaction with the surrounding environment.
Scene Understanding
Semantic segmentation also plays a vital role in scene understanding for autonomous vehicles. By providing a detailed understanding of the scene, including road scene perception, the vehicle can identify drivable areas, lane boundaries, and potential obstacles. This information enables the vehicle's decision-making system to make informed choices based on the current driving situation, significantly improving the vehicle's overall performance and safety.
Lane Estimation and Pedestrian Detection
In addition to object detection and scene understanding, semantic segmentation is crucial for lane estimation and pedestrian detection. By accurately segmenting the road and identifying lane markings, the vehicle can maintain its position within the lanes, ensuring safe navigation. Semantic segmentation also enables the detection of pedestrians, allowing the vehicle to identify and respond to their presence, further enhancing the safety of both pedestrians and vehicle occupants.
Overall, semantic segmentation serves as a fundamental component of the perception system in autonomous vehicles. It enables object detection and tracking, scene understanding, road scene perception, lane estimation, pedestrian detection, and much more. With its widespread applications, semantic segmentation plays a vital role in making autonomous vehicles safer, smarter, and more efficient.
Advances in Semantic Segmentation for Off-Road Environments
Semantic segmentation in off-road environments poses unique challenges due to the unstructured nature of the surroundings. While camera-based perception algorithms heavily rely on color and texture features, they are susceptible to changes in lighting conditions, which undermines their reliability in off-road settings. On the other hand, LiDAR sensors offer rich environmental information and demonstrate greater robustness in challenging conditions such as rain or fog.
To address these challenges, researchers have developed various approaches to semantic segmentation in off-road environments. One such approach involves feature engineering algorithms that extract geometric features from the sensor data. By leveraging the distinctive geometric characteristics of objects in off-road environments, these algorithms improve the accuracy and reliability of semantic segmentation results.
Another avenue of exploration is the use of weakly supervised and transfer learning methods in off-road semantic segmentation. Weakly supervised learning allows the model to learn from partially labeled or imperfect data, reducing the need for extensive manual annotation. Transfer learning, on the other hand, leverages pre-trained models on large-scale datasets to enhance the performance of the semantic segmentation model in off-road environments.
These advances in semantic segmentation for off-road environments aim to improve the accuracy and robustness of the perception system in autonomous vehicles. By effectively segmenting point cloud data and extracting meaningful information, autonomous vehicles can navigate safely and efficiently in various terrains.
With the integration of these advancements, autonomous vehicles can perform accurate semantic segmentation in off-road environments, enabling them to make informed decisions based on a detailed understanding of their surroundings. These developments pave the way for safer and more efficient autonomous driving systems, bringing us closer to a future where autonomous vehicles are capable of seamlessly navigating through diverse terrains and challenging conditions.
Evaluating Semantic Segmentation Models
Evaluating the performance of semantic segmentation models is crucial to ensure their accuracy and reliability. Researchers and developers rely on a variety of evaluation metrics to assess the quality of segmentation results, enabling them to make informed decisions and improve the performance of their algorithms.
One commonly used evaluation metric is accuracy, which measures the overall correctness of the segmentation. It calculates the percentage of correctly classified pixels, providing an indication of how well the model performs in accurately assigning each pixel to its corresponding class.
Another important evaluation metric is intersection over union (IoU), which evaluates the overlap between the predicted segmentation and the ground truth. IoU calculates the intersection area divided by the union area of the predicted and ground truth segmentation masks. By measuring the degree of overlap, IoU provides insights into how well the model captures the boundaries of different objects and classes.
In addition to accuracy and IoU, pixel-wise accuracy is another evaluation metric used in semantic segmentation. Pixel-wise accuracy measures the percentage of correctly segmented pixels in relation to the total number of pixels in the image. It provides a comprehensive assessment of the model's ability to accurately assign each pixel to its corresponding class.
Evaluation metrics play a vital role in the development and optimization of semantic segmentation models. They help researchers and developers understand the strengths and weaknesses of their algorithms, allowing them to fine-tune their models for better results.
Conclusion
Semantic segmentation plays a crucial role in the advancement of autonomous vehicles. By accurately assigning each pixel in an image to a specific class, this technology enables AI-powered perception systems to understand and interpret their surroundings. The use of deep learning techniques, such as convolutional neural networks and autoencoders, has significantly improved the efficiency and accuracy of semantic segmentation in autonomous vehicles.
Through real-time data analysis and the integration of computer vision technology and AI applications, semantic segmentation enhances the safety and efficiency of autonomous driving systems. With ongoing research and development, this technology will continue to play a vital role in enabling the widespread adoption of autonomous vehicles.
As the industry progresses, the seamless integration of semantic segmentation in autonomous vehicles will bring us closer to a future of safer and more efficient transportation. By leveraging AI technology and computer vision, we can confidently pave the way for self-driving vehicles, ensuring road safety and optimizing overall efficiency in transportation systems.
FAQ
What is semantic segmentation in autonomous vehicles?
Semantic segmentation is a technique that involves accurately assigning each pixel in an image to a specific class, allowing autonomous vehicles to understand and interpret their surroundings.
How do deep learning techniques improve semantic segmentation in autonomous vehicles?
Deep learning algorithms, such as convolutional neural networks (CNNs) and autoencoders, have significantly improved the efficiency and accuracy of semantic segmentation in autonomous vehicles.
What is the role of real-time data analysis in semantic segmentation?
Real-time data analysis enables autonomous vehicles to analyze sensor input quickly and accurately, providing valuable information about the objects present in the driving scene.
What are the applications of semantic segmentation in autonomous vehicles?
Semantic segmentation is essential for object detection and tracking, scene understanding, road scene perception, lane estimation, pedestrian detection, and other tasks that require a detailed understanding of the environment.
How does semantic segmentation work in off-road environments?
In off-road environments, semantic segmentation faces unique challenges. Researchers employ feature engineering algorithms, weakly supervised learning, transfer learning, and other approaches to improve accuracy and robustness in these scenarios.
What evaluation metrics are used to assess semantic segmentation models?
Commonly used evaluation metrics include accuracy, intersection over union (IoU), and pixel-wise accuracy, which provide insights into the performance and quality of segmentation results.
Why is semantic segmentation important for autonomous vehicles?
Semantic segmentation enables autonomous vehicles to accurately perceive and understand their surroundings, improving the safety and efficiency of autonomous driving systems.
What is the future of semantic segmentation in autonomous vehicles?
With ongoing research and development, semantic segmentation will continue to play a vital role in enabling safe and efficient autonomous vehicles, harnessing the power of AI technology and computer vision.